3. Spacecraft Design Drivers, Space and Orbit
3.5 Orbital Mechanics
The most brilliant scientific minds of ancient times had radically different views of the motion and nature of the planets, sun, and stars. They accepted their view as a certainty – the nature of the universe as they believed it. Some ancient scientists and astronomers did experiments that threw some of these beliefs into question. It is important to the student to understand how our current understanding evolved, who were the scientists that led us to our current understanding, how they did it, and the difficulties they encountered when they presented their radical ideas. For the evolution of astronomy, we should really start with the ancient Babylonians, Chaldeans, and Chinese, but we are concentrating on the evolution of orbital mechanics. From the first century A.D., the prevailing theory of the solar system was the Ptolemaic System (developed by Roman citizen Claudius Ptolemaeus) in which the Sun and planets rotated around the Earth, although not centered on the Earth, using a complex system of epicycles. This system was very complicated but did match the observed movements fairly closely. The current sun-centered (heliocentric) system was introduced by Copernicus, and that’s where we’ll start.
History of Astrodynamic
Nicolaus Copernicus (1473-1543)

- Roman Catholic cleric
- Developed a heliocentric model of the solar system and published it in the book On the Revolution of the Celestial Spheres which he dedicated to Pope Paul III in 1543.
- Martin Luther said, “This fool wishes us to reverse the entire science of astronomy…sacred scriptures tell us that Joshua commanded the Sun to stand still and not the Earth!”
- The book was put on the forbidden list by the Church in 1616 and not removed until 1835.
- Copernican model of the solar system was heliocentric with Earth rotating on its axis
- simpler than the Ptolemy model and better able to explain the observed behavior of heavenly bodies (rising and setting caused by rotation on-axis)
- seasons explained by annual revolution around the sun
- Deficiencies in the Copernican model:
- kept planets in perfectly circular orbits
- could not prove Earth moved
- kept stars in a crystalline shell


Galileo Galilei (1564-1642)

- Built the first telescope used for astronomy in 1609 – magnification was 20x
- Dutchman, Zacharias Janssen, the first known telescope maker, made a copy of an earlier Italian specimen of unknown origin in 1608
- Made first detailed maps of the Moon (determined it was a solid world with mountains & craters)
- Discovered moons around Jupiter
- In 1610 published Messenger of the Stars, which presented a formidable array of observational evidence to disprove the Ptolemaic system
- “Wandering stars” (planets) apparent retrograde and wandering motion was explained by Galileo



Tycho Brahe (1546-1601)

- Danish nobleman who studied astronomy & built an observatory castle
- Lost his nose in a duel and had it reconstructed of gold, silver, & wax
- Tenacious astronomical observer
- Pushed instruments to limit (Brahe’s quadrant) with observation precision of 4-5 arc minutes
- Observation of supernovas & comets led to the conclusion that solid crystalline spheres did not exist in space since things were not supposed to change in the superlunar realm
- Did not accept the Copernican system
- Died at the dinner table in the court of King Rudolf II

Johannes Kepler (1571-1630)

- German mathematician from a poor former noble family
- Started working in 1600 for Tycho Brahe, who died in 1601
- Challenged by Brahe to calculate the orbit of Mars, which Kepler did for over five years (1601-1606)
- Kepler couldn’t reconcile circular motion to Brahe’s data – consistently had 8 minutes of arc discrepancy between theory and data
- Finally fit the data when an ellipse was used with the Sun at one focus
- Kepler was so confident in Brahe’s data and his fit, he made it into a law of motion

- This became Kepler’s First Law of Planetary Motion:
- The orbits of the planets are ellipses with the Sun at one focus
- He noticed that the line between the Sun and Mars swept out equal areas in equal times, thus a planet must move faster as it approaches the Sun – this resulted in Kepler’s Second Law:
- The line joining a planet to the Sun sweeps out equal areas in equal times
- Kepler published these two laws in 1609 in the book Astronomia Nova … De Motu Stellae Mars (New Astronomy…On the Motion of Mars)
- Ten years later he added his third law, i.e., Kepler’s Third Law:
- The square of the period of a planet is proportional to the cube of its mean distance from the Sun.

Image courtesy of Honeywell Technology Solutions, Inc.
- The square of the period of a planet is proportional to the cube of its mean distance from the Sun.

Sir Isaac Newton (1642-1727)

- In 1665, while a student at Trinity College in Cambridge, the plague caused the university to close for two years
- During these two years, which he spent at his home village in the country, he formulated the three laws of motion, conceived the law of gravitation, developed the concept of differential calculus, and worked with optics (discovered spectrum)
- His law of gravitation resulted from his observation of a falling apple – however, due to an erroneous value for Earth’s radius, he discounted his gravity work
- At age 27 he was appointed to the Chair of Mathematics at Cambridge and at 30 was elected to the Royal Society
- In 1684 Robert Hooke boasted to Christopher Wren and Edmond Halley that he had worked out the laws of motion governing the heavenly bodies. Wren was unimpressed with Hooke’s solution and so put up a prize (40/-) for the correct answer. Halley took the problem to Newton who had solved the problem in 1665.
- At the urging of Halley, Newton recalculated his formulations and with the correct radius of the Earth, came up with the exact answer that matched observations.
- Newton published his laws and discoveries in 1687 in the book Philosophiae Naturalis Principia Mathematica, better known today simply as Principia.
- Newton was:
- elected to Parliament in 1689
- appointed Warden of the Mint in 1696
- elected president of the Royal Society in 1703
- knighted in 1705
- Newton’s Laws of Motion:
- LAW 1
- Everybody continues in its state of rest, or of uniform motion in a right line unless it is compelled to change that state by forces impressed upon it.
- LAW 2
- The change of motion is proportional to the motive force impressed and is made in the direction of the right line in which that force is impressed.
- LAW 3
- To every action there is always opposed an equal reaction; or, the mutual actions of two bodies upon each other are always equal, and directed to contrary parts.
- LAW 1
- Newton’s Law of Universal Gravitation
- The force of gravity between two bodies is directly proportional to the product of their two masses and inversely proportional to the square of the distance between them.

The Basics
Kepler’s three Laws of Planetary Motion, Newton’s Law of Universal Gravitation, and Newton’s three Laws of Motion provide the building blocks upon which orbital mechanics are built. We will use these principles to develop the equations and parameters we need to describe orbital motion and to see how satellites work and the different types of orbits that are available. We will later even have a brief look at interplanetary trajectories, but let’s start with the basics.
Newton’s Laws of Motion
To show how we get from these seven laws to what we know as orbital mechanics, let’s start with Newton’s laws of motion. For convenience, we have reworded Newton’s Laws to the modern English form.
To show how we get from these seven laws to what we know as orbital mechanics, let’s start with Newton’s laws of motion. For convenience, we have reworded Newton’s Laws to the modern English form.

FIRST LAW
Every object will remain at rest or in uniform motion in a straight line unless compelled to change its state by the action of an external force. This is normally taken as the definition of inertia. The key point here is that if there is no net force acting on an object (if all the external forces cancel each other out), then the object will maintain a constant velocity. If that velocity is zero, then the object remains at rest. If an external force is applied, the velocity will change because of the force.
SECOND LAW
The time rate of change of the momentum of a body is equal in both magnitude and direction to the force imposed on it. This law defines a force to be equal to a change in momentum (mass times velocity) per change in time. The linear momentum and angular momentum are given by the following equations:
Linear Momentum: p = mv
Angular Momentum:
![]()
Where p is the angular momentum vector, m is the mass of the body, and v is the velocity vector. In the second equation, h is the angular momentum vector, I is the moment of inertia of the body, is the angular velocity or rate, R is the position vector from the origin of the cartesian coordinate system.
 This is the famous equation that Force = mass times acceleration (assuming the mass stays constant).
This is the famous equation that Force = mass times acceleration (assuming the mass stays constant).
THIRD LAW
For every force, there is an equal and opposite reaction. This law is the basis for rocket propulsion, and releasing a filled balloon with the mouth open and seeing it fly around is an example of this law in work. Mathematically it looks like this:

NEWTON’S LAW OF UNIVERSAL GRAVITATION
The force of gravity between two bodies is directly proportional to the product of their two masses and inversely proportional to the square of the distance between them.
Newton’s Law of Universal Gravitation is expressed mathematically. It includes a universal constant, G, whose value was determined by Henry Cavendish in 1798.



We just showed the application of Newton’s Law of Universal Gravitation for two bodies, such as a satellite orbiting the Earth. However, the law actually takes into account all bodies with mass as shown in the following figure. Consider a system in which there are n masses (m1, m2, m3,…mn). Applying Newton’s Gravitational Law, each mass exerts an attractive force on all the other masses along lines connecting the pair of masses. The body (mass) of interest is  .
.

Applying Newton’s Gravitational Law, the force on mi by all n masses is the vector sum of all gravitational forces acting on it:

 is the resultant force of all non-gravitational forces acting on the body:
is the resultant force of all non-gravitational forces acting on the body:
=  +…
+…
 =
= 
Applying Newton’s Second Law of Motion and assuming = 0

A closed-form solution does not exist for n>2.
Assume m1 is Earth and m2 is a satellite orbiting Earth, then it can be shown that the acceleration of the satellite relative to Earth is:

The perturbing effects of other bodies are shown in the table. Effect of Other Bodies on Gravitational Acceleration for a Satellite at an Altitude of 370 km.
Attracting Body Acceleration in g’s on Satellite

The Two-Body Problem
The equation shown for Newton’s Law of Universal Gravitation for n bodies is unsolvable in a closed-form solution. However, the equation is solvable for two bodies, and as seen from the table the effects of the other planetary bodies are relatively small for a satellite orbiting the Earth, so we will ignore the external effects and consider two-body orbital mechanics. If you want precise solutions, then the other bodies have to be included and numerical methods used.

Assumptions
To treat the spacecraft motion as a two-body problem, we have to make the following four important assumptions:
- The mass of the satellite (m2) is negligible compared to that of the attracting primary body (m1).
- The coordinate system chosen for a particular problem is inertial. This assumption removes derivatives of the coordinate system itself when differentiating vectors. Assume Earth-orbiting satellites use the geocentric equatorial coordinate system and interplanetary probes use the heliocentric system.
- The bodies of the satellite and attracting primary body are spherically symmetrical with uniform density. This allows us to treat each as a point mass.
- No other forces act on the system except for gravitational forces that act along a line joining the centers of the two bodies. This also means the masses are constant (i.e., no change in mass).
Equation of Motion
Assume two constant masses interact by a force that is a function only of the relative distance between the two masses and that is directed along with the position m2 with respect to m1.

The differential equation of motion for the two-body problem is:


Center of Mass
Moment of a mass mi about a point P is the vector with magnitude  |• and direction
|• and direction  where goes from to P. Moment of mass of the system about P for n masses is thus:
where goes from to P. Moment of mass of the system about P for n masses is thus:

The Center of Mass (CM) is that point at which the total moment of mass = 0.

In a two-body system, we can locate the CM (P’):

Now consider a coordinate system with the origin at m2 and the x-axis along the line between m1 and m2, the y-axis in the plane formed by r1 and r2, and the z-axis completing the RH coordinate system.
The center of mass will be located on the line connecting the two masses. Its exact location is defined by:

Distance of CM from mass m2 along the line between m1 and m2 is:

Assuming origin is at m2 (i.e.,  = 0):
= 0):

Where R =  , the distance between
, the distance between  and
and 
Assuming origin is at m1 (i.e., r1 = 0):

Example Problem
What is the center of mass of the Earth-Moon pair?

Given:

Canonical Units
Canonical units are dimensionless units used by astronomers to remove uncertainties. They are also sometimes used in spacecraft orbital mechanics. Canonical units are based on hypothetical circular reference orbits:

One obvious advantage of using Canonical Units is when you have to calculate orbital mechanic equations by hand that us the gravimetric parameter, which is Canonical Units is simply:
Constants of Motion
Because spacecraft operate in a conservative gravitational field, they conserve mechanical energy and angular momentum. Using these two principles, we are able to easily determine and predict the motion of spacecraft.
Conservation of Mechanical Energy
Since the gravitational field is “conservative” an object moving under the influence of the gravitational field alone does not lose or gain total mechanical energy. Although mechanical energy remains constant, it exchanges one form, “kinetic energy” for another, “potential energy.” The total mechanical energy (E) is often used in orbital mechanics with a constant mass, so we usually use a simplified term, the total mechanical energy per unit mass called the total specific mechanical energy:

But the total mechanical energy is the sum of the kinetic and potential energy, so we can express the specific mechanical energy in the form:

This equation is known as the Vis-Viva Equation and is one of the most important equations in orbital mechanics. The Vis-Viva Equation shows the total mechanical energy per unit mass of the satellite converses. The specific potential energy is also equal to the gravitational potential function (V) per unit mass. One thing to note is that potential energy (PE) is zero at an altitude of infinity, and is increasingly negative between zero and the origin at r=0, i.e., PE<<0.

Conservation of Angular Momentum
Since the gravitational field is always directed radially towards the center of the large mass the angular momentum of the object about the large mass does not change, the angular momentum per unit mass, called the specific angular momentum (h), can be derived as:

h is always perpendicular to the plane containing r and v. Since h is constant, r and v must remain in the same plane, which is called the orbital plane. In the figure, we see some of the terms we use in describing the satellite motion and orientation in the orbital plane.

Note that satellites that want to keep one face always pointing towardXZ the Earth, use what is called an LVLH attitude hold, where LV is the Local Vertical and LH is the Local Horizontal as defined in the figure. In orbit, the terms “up” and “down” are generally in reference to the LV vector, which is the vector from the center of the primary mass (m1) to the satellite (m2).
In the figure the following angles are defined:

From which we get the following:

Example Problem:



Trajectory Equation
From geometry, we know that the polar form of the equation for a conic section is:



The family of curves called “conic sections” (i.e., circle, ellipse, parabola, hyperbola) represent the only possible paths for an orbiting object in the two-body problem. The circle and ellipse are closed-loop conics, while the parabola and hyperbola are open conics. The focus of the conic orbit must be located at the center of the central body. The specific mechanical energy (ε) of a satellite (which is the sum of the kinetic and potential energies) does not change as the satellite moves along its conic orbit. However, there is an exchange of energy between the two forms (P.E. and K.E.) which means that the satellite must slow down as it gains altitude (i.e., r increases) and speed up as r decreases so that ε remains constant. The orbital motion takes place in a plane fixed in inertial space. The specific angular momentum (h) of a satellite remains constant. As r and v change along the orbit, the flight path angle () must change so as to keep h constant.
Elliptical Orbits
The most common type of conic section used in Earth-orbiting satellites is the ellipse. To understand these orbits, we must first be familiar with the geometry and characteristics of ellipses.

Apses of an Ellipse
Extreme end-points of the major axis of an ellipse are known as apses (singular apsis). The point closest to the primary focus is the periapsis (rp) and the point farthest from the primary focus is the apoapsis (ra). “Peri-” means near and “apo-” means far.
Tables: The Apses Names for Planetary and Other Bodies

The Geometry of the Ellipse
Equation of an ellipse in rectangular coordinates:

where a is the semi-major axis, and b is the semi-minor axis
Equation of an ellipse in polar coordinates (which was defined previously):

Eccentricity, e, defines the shape of the ellipse by comparing the ratio of the distance between the two foci and the length of the major axis:

Following are some other useful equations derived from the geometry of the ellipse that are useful in orbital mechanics.
Semi-Major Axis:

Distance Between Foci:

Eccentricity:

Apsides:
From the conic equation

At periapsis ( ), the true anomaly, v=0 and the cos v =1.
), the true anomaly, v=0 and the cos v =1.

At apoapsis ( ), the true anomaly, v=180deg and the cos v=-1.
), the true anomaly, v=180deg and the cos v=-1.

From the construction of the ellipse, shown in Figure:

Semi-Latus Rectum:

Rewriting the trajectory equation, substituting for p:

Orbital Energy
The equation for the specific mechanical energy (Vis-Viva Equation) is important for determining orbital characteristics, but there is another form that is also very useful, and this is known as the Orbital Energy Equation.
We start with the equation for angular momentum:
![]()
applying this equation at periapsis where the flight path angle  =0,
=0,

Using the equation for specific mechanical energy () and noting energy is constant everywhere on the orbit:

From this, you can obtain the Orbital Energy Equation, which is true for all conics:

The Orbital Energy Equation shows that the specific mechanical energy is inversely proportional to the orbit’s semi-major axis, i.e., a only depends on ε, which depends only on r and v. The energy of a satellite along the orbit determines which type of orbit it is in.

For example, firing a cannon horizontally from a high mountain:

In two-body motion, the shape of an orbit is determined by the speed of the object.


However, if h = 0 regardless of ε then e = 1 (degenerate conic – point or line, but not parabola). All parabolas have e=1, but an orbit with e=1 does not have to be a parabola – it could be a degenerate conic (point or line).
Period of an Elliptical Orbit
Kepler’s Second Law of Planetary Motion states “Equal areas are swept out by the radius vector in equal time intervals.”

It can also be shown that:

When we combine these equations we obtain:

Since h is constant this proves Kepler’s Second Law. Integrating this equation through one cycle (time period, P) noting that area of an ellipse is  =
=  ab gives the equation for the total period of an orbit, which is the equation of Kepler’s Third Law of Planetary Motion, “The square of the period of a planet is proportional to the cube of its mean distance from the Sun.”
ab gives the equation for the total period of an orbit, which is the equation of Kepler’s Third Law of Planetary Motion, “The square of the period of a planet is proportional to the cube of its mean distance from the Sun.”

Therefore, the period of an elliptical orbit depends only on the size of the semi-major axis, a.
Non-Elliptical Orbits
Although most Earth orbits are elliptical, some of them have such a low eccentricity that they can be considered to first order as circular. When you want to escape from the Earth’s gravitational field, then you must use parabolic or elliptical trajectories, so it is important to examine the characteristics of these other trajectory types.
Circular Orbits
Circular orbits are really a special type of elliptical orbit, but with an eccentricity e=0, which means that the periapsis and apoapsis radii are equal to the semi-major axis and the radius of the circular orbit.
Parabolic Trajectories
A parabolic trajectory is the lowest energy open-loop trajectory, in which a spacecraft can just escape the gravitational field of the central body.


or


Thus, at any value of r, the specific KE ( /2) will be equal to the specific PE (-/r). The satellite will have just enough KE to follow the parabolic trajectory to ∞ where both KE and PE will be zero.
/2) will be equal to the specific PE (-/r). The satellite will have just enough KE to follow the parabolic trajectory to ∞ where both KE and PE will be zero.
Escape Speed
The speed at which a probe can coast to an infinite distance without falling back is called the escape speed. Probe with escape speed in any direction travels on a parabolic trajectory. The escape speed is calculated using two points on a trajectory: (1) at a distance r where escape speed is  , and (2) at infinity (r=∞).
, and (2) at infinity (r=∞).

Escape Speed:

If the probe starts in a circular orbit, then the escape speed from a circular orbit is:

HyperbolicTrajectories
A parabolic trajectory produces the minimum v for escape from a central body in a gravitational field. If excess v is desired after an escape, then the trajectory must be hyperbolic.

The angle between asymptotes is δ, which is called the turning or scattering angle. This is the change in direction of v approach to v departure.
Turning Angle:

Hyperbolic Excess Speed
If ε > 0, then a is negative, e >1, and trajectory is hyperbolic.

If  > where is burnout speed and is minimum escape speed, then the probe approaches finite speed at infinity that is greater than zero. This speed can be calculated given v and r since the specific mechanical energy is constant everywhere on the trajectory.
> where is burnout speed and is minimum escape speed, then the probe approaches finite speed at infinity that is greater than zero. This speed can be calculated given v and r since the specific mechanical energy is constant everywhere on the trajectory.
Using the energy equation you can calculate the Hyperbolic Excess Speed:

The magnitude of the burn to reach the required excess speed (called the Oberth Maneuver) is:

The value of a can be found from:

Coordinate Systems
Orbital mechanics uses many different coordinate systems to express the spacecraft trajectories in terms that are meaningful for the current mission or application. It depends on whether the spacecraft is in Earth orbit, a cis-lunar (Earth to Moon) trajectory, an interplanetary trajectory, or orbiting another gravitational body. We will introduce the most commonly used coordinate systems. To start with we will explain the fundamental elements of a cartesian (orthogonal ) coordinate system and how to specify such a coordinate system.
There are five steps in specifying a coordinate system:
1. Pick the origin.
2. Pick the fundamental plane.
3. Pick a perpendicular to it.
4. Pick the principal direction.
5. Add the third axis using the Right-Hand Rule (RHR).

Heliocentric-Ecliptic Coordinate System

- Origin is the Sun.
- The fundamental plane is the ecliptic (Earth’s orbital plane).
- Perpendicular is in the direction using RHR with the direction of Earth around the Sun.
- The principal direction is the vernal equinox.
- Y-axis according to RHR.
Note: Earth’s rotation axis precesses with a period of 26,000 years.
Geocentric-Equatorial Coordinate System (GECS)

Also known as Earth-Centered Inertial (ECI) or IJK Coordinate System
- Origin is the center of the Earth-mass (geocenter).
- The fundamental plane is the equatorial plane.
- Perpendicular is in the spin axis in the northerly direction.
- The principal direction is the vernal equinox.
- Y-axis according to RHR.
Note: Axes do not rotate with the Earth.
Geographic Coordinate System (GCS)

- Origin is the center of the Earth-mass (geocenter).
- The fundamental plane is the equatorial plane.
- Perpendicular is in the spin axis in the northerly direction.
- The principal direction is in the fundamental plane and points to the Greenwich meridian.
- Y-axis according to RHR.
Note: GCS rotates with the Earth.
Right Ascension-Declination Coordinate System

- Origin is the geocenter or any point.
- The fundamental plane is the celestial equatorial (Earth’s equator extended to a celestial sphere).
- The principal direction is to the vernal equinox.
Learning Objectives
Objects located by (RA) measured eastward from I in the equatorial plane and measured northward from the equatorial plane. This coordinate system is used in astronomy.
Perifocal Coordinate System

- Origin is the primary focus of the orbit.
- The fundamental plane is the orbital plane of the satellite.
- The principal direction (X-axis) points to periapsis.
- Y-axis is rotated 90o in the direction of orbital motion and lies in the orbital plane.
- Z-axis is along angular momentum vector (h) and completes the RH system.
Classical Orbital Elements
An orbit follows the laws of Newton and Kepler around its central gravitational body (primary focus) and its motion is very predictable without major outside disturbances (e.g., drag) or internal disturbances (e.g., thrust). It orbits in a basically inertial plane with respect to the center, and there are six parameters that define the orbit and the position of the satellite in the orbit. These parameters are called the Classical Orbital Elements (COEs). Five of the COEs define the orbit, and the sixth defines the position of the satellite in the orbit at the given time. We will define the six primary COEs and their alternatives.
1. Semi-Major Axis (a)
This defines the size of the orbit.
2. Eccentricity (e)
Defines the shape of the conic orbit,

3. Inclination (i) 0º ≤ i ≤180º
Defines the tilt of the orbital plane with respect to the fundamental plane. i is equal to the angle between the orbital and equatorial planes, although mathematically, it is the angle between the spin axis (Z) and the angular momentum angle (h) of the orbital plane.
4. Right Ascension of the Ascending Node (Ω)
Defines the swivel of the conic orbit wrt the fundamental plane. Ω is the angle, in the fundamental plane, between the X-axis and the ascending node, which is the point where the satellite passes through the fundamental plane in a northerly direction and is measured counterclockwise (easterly) when viewed from above. UNDEFINED IN EQUATORIAL ORBITS! aka Longitude of the Ascending Node
5. Argument of Periapsis/Perigee (ω)
Defines the orientation of the orbit with the orbital plane. is the angle between the ascending node and periapsis in the orbital plane and measured in the direction of satellite motion (0° ≤ ω ≤ 360°). UNDEFINED IN EQUATORIAL OR CIRCULAR ORBITS!
6. Time of Periapsis/Perigee Passage ( or T)
or T)
Defines the starting time of the orbit and is the time that the satellite was at periapsis/perigee. Standard practice replaces it with True Anomaly or epoch (νo) which defines the position of the satellite in the orbit at a given time (epoch). (0° ≤ νo ≤ 360°) UNDEFINED FOR CIRCULAR ORBITS! Note: ν, θ, and f are used to denote true anomaly. The first five COEs define the orbit, and the sixth COE defines where the satellite is in the orbit.
Alternate COEs
Most of the COEs have certain orbits for which they are undefined or there might be another parameter that provides the same information about a particular characteristic of the orbit. The set of parameters that are available to define the orbit when one of the original COEs is not possible is called the Alternate COEs.
1. Sem-Latus Rectum (p)
Alternate for semi-major axis.
2. Longitude of Perigee (II)
The angle between X-axis (i) and perigee measured eastward to the ascending node than in the orbital plane to perigee i.e., II = Ω + ω. Replaces ω for equatorial orbits. UNDEFINED FOR CIRCULAR ORBITS!
3. Argument of Latitude at Epoch ( )
)
Angle in orbital plane between the ascending node and the radius vector to the satellite at time i.e., = ω +  Replaces o for circular orbits. UNDEFINED FOR EQUATORIAL ORBITS
Replaces o for circular orbits. UNDEFINED FOR EQUATORIAL ORBITS
4. True Longitude at Epoch ( )
)
The angle between X-axis and radius vector to the satellite at to measured eastward to the ascending node and then in the orbital plane to the satellite:
![]()
Orbital Inclination
Inclination can range from 0 to 180 degrees, where a 90-degree inclination is called a polar orbit. 180 degrees of inclination is also an equatorial orbit but the satellite orbital direction is the opposite of the 0-degree equatorial orbit. As 0 to 90-degree inclination looks symmetric to the 90 to 180-degree inclination, the inclination of orbits may be broken further down into the direction of the orbit: prograde (0 to 90) and retrograde (90 to 180). “The satellite’s inclination depends on what the satellite was launched to monitor. Many of the satellites in NASA’s Earth Observing System have a nearly polar orbit. In this highly inclined orbit, the satellite moves around the Earth from pole to pole, taking about 99 minutes to complete an orbit. During one-half of the orbit, the satellite views the daytime side of the Earth. At the pole, the satellite crosses over to the nighttime side of Earth” [NASA Earth Observatory].

Effect of Launch Site on Inclination
Where the satellite is launched on the Earth’s surface and the direction of launch have direct effects on the inclination of the resulting orbit. The latitude of the launch site also determines the minimum inclination possible without later propulsive maneuvers to change the inclination. In the following figure,  is the latitude of the launch site,
is the latitude of the launch site,  is the launch azimuth, and i is the inclination.
is the launch azimuth, and i is the inclination.

Since -90° 90° cos must always be positive. A posigrade orbit must thus be easterly ( < 180°). Minimum orbital inclination achievable from launch site at is i = since for all i to be minimized, cos must be maximized, which implies = 90°. A satellite cannot be put directly into an equatorial orbit from a non-equatorial launch site.
Orbit Anomalies
Kepler invented “anomalies” (angles) originally used to define a planet’s orbit motion around the Sun. The three anomalies are true anomaly, mean anomaly, and eccentric anomaly. We have already seen and used the true anomaly, so we will now look at the other two.
Mean Anomaly

Kepler defined a quantity related to true anomaly – the )mean anomaly (M), which is the angle that the satellite would have moved since perigee if it were going at a constant speed (mean motion, n) in an imaginary circular orbit with the same period as the actual elliptical orbit. Where:

Mean anomaly is equal to true anomaly at perigee and apogee only for elliptical orbits, and at all times for circular orbits. For low eccentricity orbits, mean anomaly provides a quick way of estimating the satellite’s position.
Eccentric Anomaly
Kepler defined another angle related to a true anomaly called the eccentric anomaly (E), which is found geometrically by circumscribing an elliptical orbit with a circle and relating E to M, using the true anomaly, o. Eccentric anomaly is equal to true and means anomaly at periapsis and apoapsis only for elliptical orbits, and at all times for circular orbits.

NORAD Two-Line Elements (TLEs)
One of the most common methods of expressing Keplerian orbital elements is the NORAD two-line element (TLE) format. Originally developed by the North American Aerospace Defense Command, TLEs are also used by NASA and US Space Command (USSPACECOM) as well as many commercial and shareware satellite tracking programs. TLE element sets for many satellites are updated frequently and are available on websites like CelesTrak:
http://celestrak.com/NORAD/elements/

Orbit Types
Orbits may be classified by centric (the orbit center), altitude for geocentric orbits, inclination, directional, eccentricity, and synchronicity. To signify which planetary body the spacecraft orbits about, various prefixes are concatenated to the word centric, like Jovicentric for Jupiter, but it is sufficient to say Jupiter orbit to imply a Jovicentric orbit. The most common centric orbit is geocentric or Earth orbit. As of April 2020, we have 2,666 operational satellites currently orbiting Earth (check out this very cool open-source database of all operational satellites around Earth!) [UCS]. Earth (geocentric) orbits are usually classified by their altitude and shape, with some specialty orbits included. The most common orbit types are:
- Low-Earth Orbit (LEO) – <2000 km altitude
- Sun-synchronous orbit (SSO) is a type of LEO
- Medium Earth Orbit (MEO) – 2000 km<MEO<35,786km altitude
- Also known as Intermediate Circular Orbit (ICO)
- Includes GPS satellites at 20,200 km altitude
- Geosynchronous (GSO) or Geostationary Orbit (GEO) – 35,786 km altitude
- Highly Elliptical Orbit (HEO)
- Sometimes HEO refers to High Earth Orbit beyond GEO


Low Earth Orbits
Low Earth Orbit (LEO) is the simplest (cheapest) orbit to achieve and is the most extensively used. Over 90% of artificial objects orbiting the Earth are in the LEO “corridor” – an area bounded on the low-end by atmospheric drag factors (at about 200 km altitude) and at the high-end by the lower van Allen radiation belt (at about 1,000 km to 2000 km altitude).
Sun-Synchronous Orbits

A Sun-synchronous orbit (SSO) is a type of polar LEO that exploits the regression of the ascending node caused by the Earth’s equatorial oblateness to “twist” the orbit at a rate of one revolution per year (0.9856 degrees per day). The result is that the orbit plane will always maintain the same angle (β) with respect to the Sun, and the satellite crosses the equator at the same local time every orbit.
Since a satellite in a Sun-synchronous orbit always crosses the equator at the same time, it is common for their ascending (or descending) nodes to be measured in time rather than as an angle from the vernal equinox vector. The relationship can be seen in the following figure.
Note that the example in the figure is only valid for the first day of spring when the vernal equinox happens to line up with the Earth-Sun line. For other times of the year, the time must be corrected with the “Greenwich hour angle”.


A dawn-dusk orbit is an SSO in which the ascending node occurs around local dawn (~06:00 h) and the descending node corresponds to local dusk (~18:00 h) on every orbit. If the equator crossings happen in the opposite order, the SSO is called a dusk-dawn orbit. These types of SSO straddle the terminator, the line between night and day. The result is that the satellite is illuminated by the Sun almost continuously for most of the year. This is advantageous for satellites with high power requirements.
Dawn-dusk orbits (or dusk-dawn orbits) still enter the Earth’s shadow at certain times of the year because of the Sun’s apparent change in position relative to the Earth. These periods are called eclipse seasons.
For a dawn-dusk orbit, the most northern part of the orbit will be in shadow when the Sun appears “lowest” relative to the equator around the winter solstice. If the orbit is dusk-dawn, the eclipse season takes place around the summer solstice when the Sun appears “highest” relative to the equator.

Medium Earth Orbits
A Medium Earth Orbit (MEO), is sometimes called an Intermediate Circular Orbit (ICO). These orbits lie between the LEO (<2000 km) and GEO (35,786 km) altitudes, but they typically have an altitude of approximately 10,000 km and an orbital period of about 6 hours. This orbit is popular for communications satellite constellations. MEO satellite constellations require fewer satellites than an LEO constellation to achieve global coverage but at the expense of increased signal time delay (50-150 msecs round trip delay as opposed to just 20-40 msecs at LEO).
Global Positioning System (GPS)
The Global Positioning System (GPS) constellation is also considered an MEO constellation but is actually in a 12-hour semi-synchronous orbit at a much higher altitude – 20,200 km than most of the MEO satellite constellations. 24 GPS satellites reside in six orbital planes at 55o inclination, four satellites per plane. There is little atmospheric drag at 20,200 km, so the GPS orbits are quite stable. The primary perturbation forces are the Earth’s equatorial oblateness, solar radiation pressure, and third-body gravitational effects of the Sun and the Moon.

GLONASS Navigation Constellation
GLONASS, or “Global Navigation Satellite System”, is a Russian space-based satellite navigation system operating as part of a radio navigation satellite service. It provides an alternative to GPS and is the second navigational system in operation with global coverage and of comparable precision. It provides better coverage at high latitudes than GPS because this area is of more importance to Russia. The GLONASS constellation consists of 24 satellites in three orbital planes (eight satellites per plane) at an altitude of 19,100 km and an orbital inclination of 64.8 deg.
https://en.wikipedia.org/wiki/GLONASS
Galileo Navigation Constellation
Galileo is a global navigation satellite system (GNSS) that went live in 2016, created by the European Union through the European Space Agency (ESA), operated by the European GNSS Agency (GSA). One of the aims of Galileo is to provide an independent high-precision positioning system so European nations do not have to rely on the US GPS, or the Russian GLONASS systems, which could be disabled or degraded by their operators at any time. The Galileo GNSS consists nominally of 24 satellites in three orbital planes (eight satellites per plane) at an altitude of 23,222 km and an orbital inclination of 56.0 deg.
https://en.wikipedia.org/wiki/Galileo_(satellite_navigation)
Constellation visibility from a point on the Earth
Geosynchronous Orbits
A Geosynchronous Orbit (GSO) is any Earth orbit, regardless of inclination or eccentricity, that has a period of 24 hours. A Geostationary Orbit (GEO) is an important GSO with near-zero inclination and eccentricity, making this GSO both equatorial and circular. At an altitude of approximately 35,700 km, a satellite stationed in GEO goes about the equator at the same rate that the Earth is rotating. Therefore, it appears “stationary” as viewed from the Earth.
Although not strictly correct, both of these terms – geosynchronous and geostationary – are often used interchangeably to mean geostationary orbit. British science fiction author Arthur C. Clarke first proposed that this orbit could be used by communications satellites in a Wireless World article published in 1945. This is why GEO is sometimes called the Clarke Orbit.
Highly Elliptical Orbits
A Highly Elliptical Orbit (HEO) is one that has a very high eccentricity, with an apogee altitude much greater than its perigee altitude. The most common types of HEO are the Molniya and Tundra orbits.
Molniya Orbit
This orbit was devised by Russia as a way of stationing its communications satellites to provide better coverage of the northern latitudes of the country (compared to the coverage that could be provided by equatorial geostationary orbits. Molniya orbits have a high eccentricity (e=0.75) and a fixed apogee in the northern hemisphere, where the satellite remains for about 11 of the 12 hours of its orbital period. Fixing the apogee is done by having the orbit at one of the critical inclinations of 63.4o or 116.6o. At these inclinations, the rate of change in the argument of perigee due to the Earth’s oblateness is zero. The time distribution of the orbit results from Kepler’s Second Law or the conservation of angular momentum. For a Molniya orbit, apogee = 39,354 km altitude and perigee = 1,000 km.

Tundra Orbit
A Tundra orbit – with a period of 24 hours – is both highly elliptical and geosynchronous. Like the Molniya orbit, the Tundra is tilted at one of the critical inclinations so its apogee is fixed in the northern hemisphere. However, the Tundra orbit is at a much higher altitude and has a period of 24 hours instead of 12 hours. A telecommunications system based on Tundra orbits would require only two satellites in two orbital planes whose ascending nodes are 180o apart. In contrast, a Molniya system needs three satellites in three orbital planes with ascending nodes 120o apart. For a Tundra orbit, apogee = 53,622 km altitude and perigee = 17,951 km.
Recurrent and Sub-Recurrent Orbits
In a recurrent orbit, the ground track of the satellite repeats within 24 hours. A sub-recurrent orbit is one in which the ground track repeats after a period of time greater than 24 hours. Such orbits are necessary for Earth-observing satellites so that they can revisit ground targets in a regular and predictable manner. They are accomplished by selecting a semimajor axis (altitude) with a period that produces an integer number of revolutions per integer number of days. This altitude is called the nominal semimajor axis. The number of days or the number of orbits between repetitions is called the repeat cycle. For example, the sub-recurrent orbit of Radarsat has a repeat cycle of 343 revolutions in 24 days. That is, if the satellite is over point X at a particular time, it will again be over point X 24 days later.
Ground Tracks
The ground track is the path that a satellite traces over the Earth’s surface as it orbits. It appears to shift westward during successive orbits due to the eastward rotation of the Earth. For an LEO satellite, the ground track has the appearance of a series of sine waves when displayed on a flat Mercator projection map. The highest North-South latitude excursion of the ground track is equal to the inclination of the orbit. This website allows users to select a satellite from a list and see the Earth as viewed from that satellite: http://www.fourmilab.ch/earthview/satellite.html




The above plot shows the ground track of a satellite in a circular posigrade orbit over a time period. Assume the Earth rotates at 15°/hour. Ignore J2 effects. Determine the following characteristics of the orbit: inclination (i), period (P), semi-major axis (a), altitude (z), satellite’s orbital speed ( ), angular momentum (h), and minimum speed necessary for it to escape from the Earth ().
), angular momentum (h), and minimum speed necessary for it to escape from the Earth ().


Orbital Maneuvers
Often a spacecraft needs to change its orbit/trajectory based on the requirements of its mission. Sometimes it might need to transfer into a different orbit for a variety of reasons, or it may need to change its delta-V in order to maintain its current altitude or position. This section looks at a variety of ways to change orbits, starting with in-plane orbit transfers.
In-Plane Orbit Transfers
Apsidal Burns

Effect of Non-Apsidal Burns in Plane
- Posigrade Burn
A posigrade thrust at an arbitrary (non-apsidal) point in an elliptical orbit will rotate the line of apsides as well as increase the orbit size. This rotation will be CW or CCW depending on whether burn occurs approaching apoapsis or periapsis. It moves the periapsis closer to the thrust point.

2. Retrograde Burn
A retrograde burn at a non-apsidal point in an elliptical orbit will rotate the line of apsides and decrease orbit size. Retrograde burn moves periapsis further away from the thrust point with rotation of the line of apsides being CW or CCW depending on whether it was closer to apoapsis or periapsis.

Radial Burns
- Inward
Moves S/C radially towards Earth, resulting in the negative, meaning the S/C is no longer in a circular orbit and is approaching periapsis, which will be reached 90 deg ahead of burn point. Apoapsis is raised by the same amount, so the period stays the same.

2. Outward
Circular orbit becomes elliptical with the positive, thus S/C is approaching apoapsis, which occurs 90 deg ahead of the thrust point. Orbit size and period remain constant.
Hohmann Transfers
In 1915 a German engineer, Walter Hohmann, theorized a fuel-efficient way to transfer between orbits This method uses an elliptical transfer orbit tangent to both the initial and final orbits. Hohmann transfers are limited to orbits in the same plane (coplanar), and circular orbits or those with their lines of apsides aligned (co-apsidal orbits). All ΔV burns during the transfer are tangent to the initial and final orbits, thus the velocity vector changes magnitude, but not direction. Tangential burns (Flight Path Angle=0º) are the most important aspects of Hohmann Transfers. Assume all ΔV burns are instantaneous.
From the energy equation, ε =µ2a, when we add or subtract energy due to the ΔV burn, we change the energy of the orbit and thus its size (semi-major axis, a). To move an s/c to a higher orbit, we have to increase a, then we must increase ε by increasing v. Conversely, to decrease a, we must decrease ε.

Steps to Determine Parameters for Hohmann Transfer
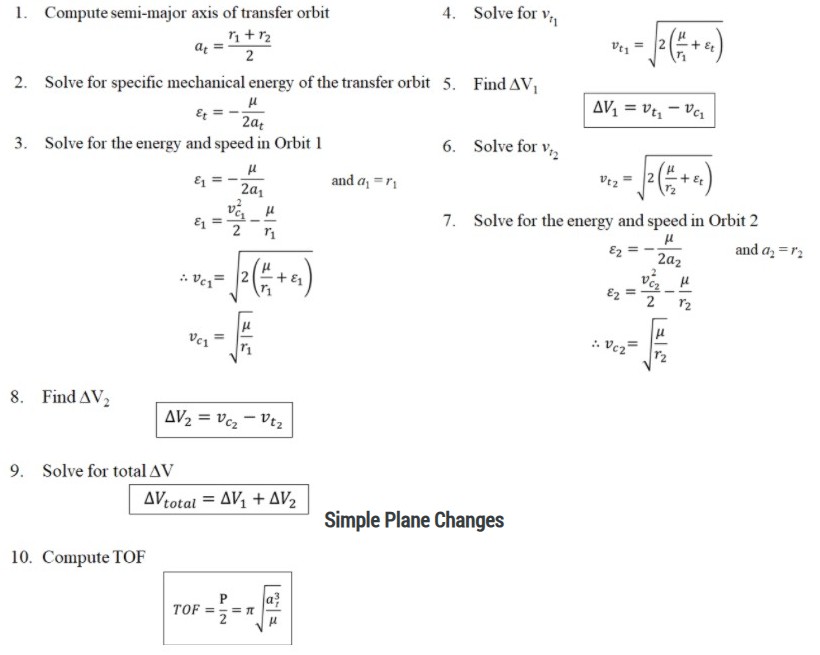 Simple Plane Changes
Simple Plane Changes
 Simple Plane Changes
Simple Plane Changes
In a simple plane change only the velocity vector’s direction changes – its magnitude remains the same, i.e.,

From the geometry in the figure above, the vectors form an isosceles triangle with the vertex angle being the plane change angle,  .
.
Δ
When θ = 60°, the isosceles triangle becomes equilateral, thus ΔV equals  (i.e., amount of energy to get into orbit in the first place). Since ΔV increases with , for elliptical orbits, the plane change should be done as close to apoapsis as possible when v is minimum.
(i.e., amount of energy to get into orbit in the first place). Since ΔV increases with , for elliptical orbits, the plane change should be done as close to apoapsis as possible when v is minimum.
Combined Plane Changes

This combines a change in direction with a change in magnitude (e.g., moving satellite from LEO with i = 28.5° to a GEO orbit with r = 42160 km and i = 0°. From geometry:

This means it is cheaper to do a combined ΔV burn than a simple plane change followed by a Hohmann transfer burn. Applying Law of Cosines:

It is cheaper to do plane changes when is least, i.e., near apoapsis.
Rendezvous
Special use of orbit transfer is to enable two spacecraft to rendezvous with one another. There are several different cases, depending on the initial orbits of the spacecraft.
Rendezvous Between Spacecraft in Coplanar Orbits


Co-Orbital Rendezvous
For this type of rendezvous, the Interceptor and Target are in the same orbit. Applying ΔV in the direction to the Target will alter the shape and size of the Interceptor’s orbit. Rendezvous is accomplished by the interceptor moving into a phasing orbit, which will return the interceptor to the same spot one orbit later in the time it takes the target to move around to that same spot.
Case A – Target Ahead of Interceptor


Case B – Target Behind Interceptor
The angular distance the target must cover to get to the rendezvous point is > 360°, thus the interceptor phasing orbit will be greater than the current orbit period. To get into the phasing orbit, the interceptor must speed up, thus entering a higher, slower orbit. This allows the target to catch up.

Lagrangian Libration Points

French scientist, Joseph Lagrange, discovered libration points in 1764 while attempting to solve the complex three-body problem. A Lagrangian Libration Point (LLP) is an equilibrium point in the gravitational fields of two major bodies where a small body will stay stationary with zero velocity and acceleration since the forces in the system balance each other out (rotating frame). The three co-axis points are called saddle points and are unstable The two orthogonal points are called trough points and are stable.
Sphere of Influence
All bodies in space exert a gravitational pull on other bodies that varies as the square of the distance between the bodies based on Newton’s Universal Law of Gravitation. Theoretically, a body’s gravitational influence extends to infinity but practically, it’s only effective within a certain volume of space called the Sphere of Influence (SOI). In the solar system, the SOI depends on the planet’s mass and how close the planet is to the sun (the Sun’s gravitational force overpowers the gravity of the closer planets).
The SOI of a planet is given by:

 = mass of planets
= mass of planets
 = mass of sun
= mass of sun
 = distance between planet and sun (use
= distance between planet and sun (use  )
)
Examples


#/media/File:Galileo_sat_constallation.gif){kind=link}